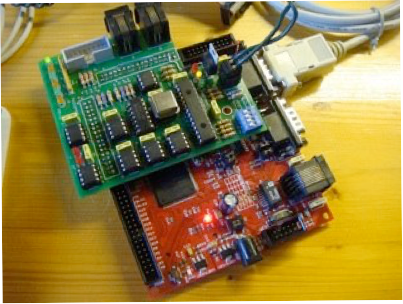
La commande du réseau est basée pour l’essentiel sur une carte principale LPC-L2294-1MB (en rouge sur la photo) comportant un microprocesseur, des ports d’entrée-sortie (port série, éthernet,...), de la mémoire (de plusieurs sortes), bref tout ce qu’il faut pour constituer l’âme d’un ordinateur dédié à la commande de trains. Pour des raisons que je ne suis pas capable d’expliquer ici, mon ami Pierre a complété cette carte par une carte dite mezzanine (ça, je vois pourquoi !), en vert sur la photo. Cette carte comporte aussi son propre micro-processeur de la mémoire EEPROM et de la mémoire RAM. En outre elle peut gérer des ports de bus CAN permettant la communication avec les cartes de commande et les cartes de cantons.
Par le biais d’un boîtier ARM-USB-OCD, la carte principale communique avec un ordinateur par le port USB et avec la carte principale par un port série. Ceci permet de programmer les cartes depuis un ordinateur Macintosh (les seuls que j’utilise). En fait certains composant sont programmer en dehors par Pierre avec d’autres outils. Quoiqu’il en soit à l’aide de commande lancée depuis un terminal depuis l’ordinateur, je peux charger en mémoire EEPROM et en Ram toute la description abstraite de mon réseau ainsi que programme Caniche qui assure le suivi de commande dont j’ai parlé précédemment. Ce programme joue un rôle fondamental puisqu’il accroche une commande de train à un convoi et le suit (et même le précède) lors de son avance de cantons en cantons. La conduite des trains est ainsi rendue indépendante comme si l’on était en commande numérique. Il est vrai que tout ceci est très numérique mais sans aucun matériel électronique embarqué dans les locomotives ! Pas de modification de motrice à réaliser, toujours délicates et coûteuses.