Voilà un sujet qui m’occupe l’esprit depuis des mois ! Dès le départ je me suis fixé certains objectifs précis sur ce point. Je souhaite un moteur lent et silencieux afin de coller le mieux possible à la réalité. J’aime le déplacement silencieux et puissant des lames d’aiguilles des vrais embranchements du monde réel. Je souhaite aussi un moteur économique étant donné le nombre important d’aiguillages que comporte mon réseau.
Les solutions commerciales de moteurs lents sont basées le plus souvent sur un moteur électrique avec une démultiplication et des contacts de fin de course. Les inconvénients de ces systèmes sont le coût et le bruit du moteur.
Aussi lorsque j’ai découvert par la lecture d’un article dans Loco-Revue l’existence des fils à mémoire de forme, j’ai perçu une possibilité intéressante. De plus, on peut se procurer ce fil au mètre, prêt à l’emploi chez Pro Rail International. Sur ce site figurent les principes de base pour l’utilisation de ces fils, y compris dans le cadre des commandes d’aiguilles. On y préconise l’usage d’un seul fil qui produira une traction lorsqu’il est chauffé par un courant, avec un rappel du mouvement par un petit ressort.
La solution proposée par Jacques Le Plat sur son site ne me satisfait pas totalement, car elle signifie de maintenir un courant de 200 mA dans le fils tant que l’aiguille est dans l’une des deux positions. Ayant beaucoup d’aiguillages, j’ai rejeté cette idée, même si Jacques Le Plat indique fort justement qu’il existe toujours une position de l’aiguille plus fréquente que l’autre et à laquelle on peut affecter la position économique du fil au repos. Le fabriquant Pégase Informatique propose un moteur d’aiguilles sur ce principe.
Je me suis donc mis à la recherche d’une solution maison répondant aux contraintes supplémentaires que je me suis fixées.
Avant de me lancer dans cette démarche j’ai évidemment regardé sur l’internet les solutions proposées par d’autres (voir par exemple Le FAMoise ou encore Les Chemins de Fer Rhétiques (RhB) au 1/87 ). L’idée de base est d’utiliser deux fils à mémoire qui sont temporairement alimentés et font basculer à tour de rôle un mécanisme d’une position à une autre. Les deux états de cette bascule définissent les deux positions de l’aiguillage.
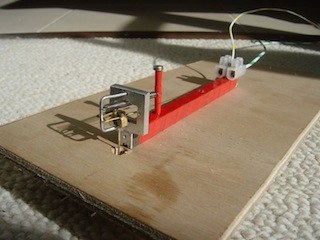
Tous les systèmes présentés sur ce sujet sont composés d’un bistable avec un ressort qui maintient dans chacune des positions.
La photo ci-dessus présente un prototype d’essai que j’ai réalisé sur ce principe.
La démarche décrite par les différents auteurs pour régler de tels systèmes est souvent assez empirique et basée sur essai-échec. Le ressort ne doit pas être trop fort pour que les fils à mémoire aient la force de faire basculer. Il ne doit pas non plus être trop faible sous peine que le positionnement de l’aiguille ne soit pas franc. J’ai repris le problème à la base avec une étude mécanique systématique.