J’avais acheté le kit de passage à niveau à commande manuelle de LMJ il y a déjà quelques mois. Il n’y avait pas urgence à le monter car dans la réalisation du décor je ne suis pas encore rendu à l’endroit du réseau où se situera le passage à niveau. Le travail sur l’éolienne (Voir l’article récent) m’a conduit à découvrir les moteurs pas-à-pas. Par ailleurs, toujours pour cette éolienne, j’ai conçu une carte électronique pour piloter le moteur. Comme cette carte est relativement petite, j’avais la place sur une surface de 1 dm2 de placer d’autres cartes pour profiter du tarif très intéressant de Seeed. J’avais réalisé en 2015 un programme et un montage sur plaque d’essai pour piloter l’unique passage à niveau (PN) de mon réseau. L’occasion se présentait donc de poursuivre ce projet et de réaliser la carte pour piloter le PN.
Je vais montrer dans cette page :
— le montage du kit LMJ
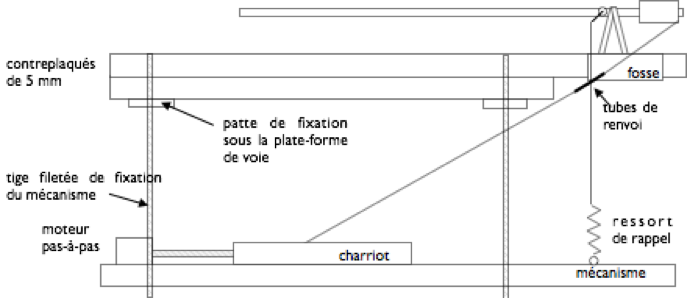
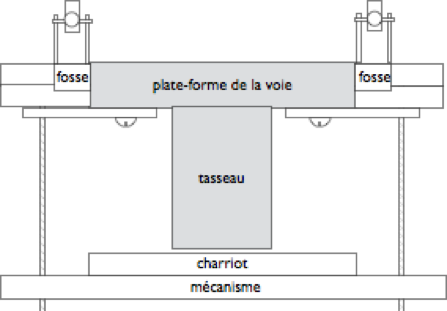
— mon mécanisme pour actionner les barrières ;
— la carte électronique de commande.
Plus tard, le moment venu, un article montrera son installation sur le réseau.
Le montage du kit LMJ
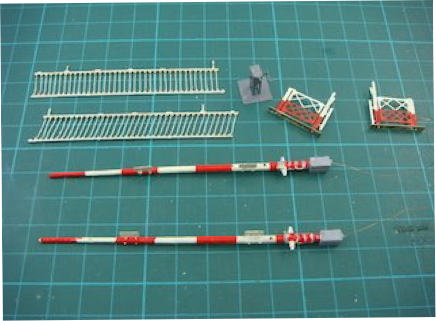
Ce kit est constitué de plaques de laiton photo-gravé, de pièces de fonderie en bronze et de divers petits accessoires (tubes de laiton, fil, auto-collant, etc.)
Les différents éléments s’assemblent facilement par soudure à l’étain en suivant méthodiquement le mode d’emploi qui est très clair. Ce modèle de PN est très réaliste. J’apprécie en particulier le fait que les filets soient articulés et, lorsqu’on relève les barrières, pendent tout comme dans la réalité.
Les photos qui suivent entrent dans le détail du montage.