C04 — Commande à asservissement de vitesse
lundi 19 juin 2023
Voilà déjà longtemps que les trains roulent sur mon réseau avec un système de commande de vitesse asservie qui fonctionne parfaitement avec des moteurs classiques ou des moteurs à rotor sans fer. Je n'ai jamais abordé en profondeur cette alimentation. Ce système a été évoqué à plusieurs reprises par le passé dans ce blog lors de la réalisation des cartes qui implémentent les fonctions. Voir en particulier ces pages du blog :
La conduite des trains
La carte de commande de 4 cantons
Séance de soudage
Séance de soudage (2)
Les alimentations de mon réseau utilisent des courants hachés dont le rapport cyclique détermine la vitesse du train, associé à un système d'asservissement de la vitesse afin que la vitesse d'un convoi reste identique malgré les variations de charge (pente, courbe, frottements parasites, etc.)
Il me semble utile de faire aujourd'hui le poinr à propos de ces alimentations, car ce type d'alimentation n'est pas très connu dans le monde du modélisme ferroviaire et encore moins compris.
Les alimentations dont je parle ici sont de conception et fabrication maison. Leur conception est le fruit d'années d'études de Pierre un spécialiste universitaire en électronique, micro-programmation, systèmes temps réel…
La conduite des trains
La carte de commande de 4 cantons
Séance de soudage
Séance de soudage (2)
Les alimentations de mon réseau utilisent des courants hachés dont le rapport cyclique détermine la vitesse du train, associé à un système d'asservissement de la vitesse afin que la vitesse d'un convoi reste identique malgré les variations de charge (pente, courbe, frottements parasites, etc.)
Il me semble utile de faire aujourd'hui le poinr à propos de ces alimentations, car ce type d'alimentation n'est pas très connu dans le monde du modélisme ferroviaire et encore moins compris.
Les alimentations dont je parle ici sont de conception et fabrication maison. Leur conception est le fruit d'années d'études de Pierre un spécialiste universitaire en électronique, micro-programmation, systèmes temps réel…
Depuis quelques années, Jean-Luc, un autre collègue travaillant lui aussi dans cette branche, participe de près à nos cogitations et au développement du système. La photo d'ouverture nous montre tous les trois dans une séance mémorable de montage d'une carte de cantons.
Nous avons tous les trois chacun notre réseau avec les mêmes alimentations de nos trains. Le mien est à l'échelle H0, ceux de Pierre et de Jean-Luc à l'échelle N. Pour ma part, si grâce à Pierre je me débrouille en réalisation de carte électronique et programmation de microcontroleurs, je ne me considère pas pour autant comme un vrai spécialiste. Cela me permet de dire sans risque pour ma modestie tout le bien que je pense de nos alimentations qui sont le fruit du travail de Pierre.
C'est possible aujourd'hui de faire ici le point sur le sujet aussi bien d'un point de vue théorique que pratique, puisque les études théoriques ont conduit à la réalisation de cartes qui fonctionnent depuis au moins 10 ans avec du matériel très varié, aussi bien en H0 qu'en N. Précisons tout de suite que nous n'avons rencontré aucun problème spécifique lié au type de moteur. Les moteurs à rotor sans fer (RSF) réagissent particulièrement bien, à condition de bien régler les divers paramètres de l'asservissement. Attention, ceci ne signifie pas pour autant qu'une alimentation commerciale avec asservissement donnera forcément satisfaction avec un moteur RSF ! Tout dépend comment elle est conçue. Un des objectifs de cet article est justement de clarifier les choses.
Nous avons tous les trois chacun notre réseau avec les mêmes alimentations de nos trains. Le mien est à l'échelle H0, ceux de Pierre et de Jean-Luc à l'échelle N. Pour ma part, si grâce à Pierre je me débrouille en réalisation de carte électronique et programmation de microcontroleurs, je ne me considère pas pour autant comme un vrai spécialiste. Cela me permet de dire sans risque pour ma modestie tout le bien que je pense de nos alimentations qui sont le fruit du travail de Pierre.
C'est possible aujourd'hui de faire ici le point sur le sujet aussi bien d'un point de vue théorique que pratique, puisque les études théoriques ont conduit à la réalisation de cartes qui fonctionnent depuis au moins 10 ans avec du matériel très varié, aussi bien en H0 qu'en N. Précisons tout de suite que nous n'avons rencontré aucun problème spécifique lié au type de moteur. Les moteurs à rotor sans fer (RSF) réagissent particulièrement bien, à condition de bien régler les divers paramètres de l'asservissement. Attention, ceci ne signifie pas pour autant qu'une alimentation commerciale avec asservissement donnera forcément satisfaction avec un moteur RSF ! Tout dépend comment elle est conçue. Un des objectifs de cet article est justement de clarifier les choses.
L'utilisation d'un courant haché (encore nommé PWM) consiste à régler la vitesse du train en interrompant la tension par intermitence avec une certaine fréquence au lieu de jouer sur la tension d'alimentation. La tension sur les rails présente alors une allure en créneaux comme le montrent les figures ci-dessus. Les variations de vitesse sont obtenues en conservant une fréquence fixe et en réduisant ou augmentant la largeur du créneau haut, c'est-à-dire le pourcentage de temps durant lequel on envoie du courant. On appelle rapport cyclique le rapport de la durée du créneau haut à la durée de la période. Ce nombre est compris entre 0 et 1. Multiplié par Umax, on obtient la tension moyenne.
L'intérêt de l'utilisation des courants hachés n'est plus à vanter. Les moteurs se comportent bien mieux, spécialement aux basses vitesses, la tension étant soit Umax soit zéro, le système est moins sensible au faux contacts entre les rails et les roues, l'électronique de commande a un meilleur rendement (elle chauffe moins). À noter que Umax peut être choisi supérieure à 12V. Sur mon réseau H0 sa valeur est de 18V.
Une étude théorique de Pierre met en évidence le comportement des petits moteurs de nos locos lorsqu'on utilise de tels courants. Une fréquence basse de la PWM (disons 50Hz ou même 100Hz) présente l'inconvénient qu'une bonne partie de l'énergie électrique va être transformée en chaleur dans le moteur et non pas en énergie mécanique. Le rendement n'est pas bon et le moteur chauffe. Ceci bien plus qu'en courant continu. Le risque de détruire le moteur en le grillant n'est alors pas nul, ce qui justifie les réticences de certains vis-à-vis de ces alimentations. Ceci cependant n'est vrai qu'aux basses fréquences. Ainsi en adoptant des fréquences de quelques kilohertz, on retrouve des rendements identiques à ceux rencontrés en courant continu, sans perdre pour autant par ailleurs l'intérêt des courants hachés. Nos alimentations ont une PWM à 32 kHz qui ne présente aucun risque de surchauffe des moteurs. Par ailleurs on élimine les bruits de vibration que peuvent donner des fréquences plus basses dans les fréquences audibles. Certains plans d'alimentations à courant haché utilisent pour simplifier la fréquence de 50 Hz du secteur. C'est la source de nombreux problèmes (vibrations, surchauffe, ronflements) qui n'existent pas à 32 kHz.
Alimentation à courant haché
Principe de l'asservissement de vitesse
L'un des problème des trains miniatures est l'impossibilité de mettre à l'échelle tous les paramètres physiques. Ainsi, les frottements sont très loin d'être ceux de la réalité divisés par l'échelle. Sur un train miniature les frottements ont une importance prépondérante, plus que dans les trains réels, par rapport aux forces motrices dont on dispose. Du côté des moteurs la puissance de ces derniers n'est pas non plus en proportion de l'échelle. Il résulte de ce constat lié aux lois de la physique que la conduite d'un train miniature présente des difficultés qui lui sont propres. Ainsi, à cause de la prédominence des frottements, il est très difficile de maintenir le train à une vitesse constante. En effet, les forces qui s'opposent à l'avancement, frottements, pentes, courbes serrées, sont loin d'être constantes ce qui signifie que pour garder une vitesse donnée, il faut fournir au moteur un courant adapté donc constamment variable. Le problème se pose aussi bien sûr pour les vrais trains, mais dans une moindre mesure grâce à l'inertie des masses en mouvement, des faibles déclivités, des grands rayons de courbure. Sur un train en modèle réduit, la coupure du courant arrête le train sur une distance de quelques centimètres alors qu'il faut plusieurs kilomètres pour stopper un train réel lancé à pleine vitesse. Avec une alimentation classique et un bouton de commande de la vitesse, le conducteur du modèle réduit doit constamment réagir pour compenser la demande variable en courant. C'est très astreignant, très difficile à faire, et ne correspond en rien à la réalité. Le problème est encore accru aux vitesses basses car le moindre élément va influer sur cette vitesse avec encore plus d'importance et par exemple provoquer l'arrêt prématuré en gare avant d'être à quai.
L'idée de l'asservissement de vitesse est de rendre automatique pour le conducteur l'obtention d'une vitesse constante indiqué par le conducteur du train. Ce qu'il réalise à la main avec difficulté avec une alimentation classique sera pris en charge par une électronique adaptée. Les avantages sont nombreux. D'une part ce système assure une fonction qu'il est impossible de correctement assurer manuellement, surtout si l'on pilote plusieurs trains en même temps ! D'autre part le système agit avec une très grande finesse et régule les vitesses même très basses ce qui autorise des arrêts en gare très réalistes comme le montre cette vidéo déjà ancienne.
L'idée de l'asservissement de vitesse est de rendre automatique pour le conducteur l'obtention d'une vitesse constante indiqué par le conducteur du train. Ce qu'il réalise à la main avec difficulté avec une alimentation classique sera pris en charge par une électronique adaptée. Les avantages sont nombreux. D'une part ce système assure une fonction qu'il est impossible de correctement assurer manuellement, surtout si l'on pilote plusieurs trains en même temps ! D'autre part le système agit avec une très grande finesse et régule les vitesses même très basses ce qui autorise des arrêts en gare très réalistes comme le montre cette vidéo déjà ancienne.
Le principe est simple. Que fait le conducteur en commande manuelle lorsqu'il veut garder une vitesse constante ? S'il voit le train ralentir il donne un peu plus de courant en tournant le bouton . Si il voit le train trop augmenter sa vitesse, il tourne le bouton dans l'autre sens pour diminuer le courant délivré. Tout cela est affaire de dosage ! Il faut mettre en place un système automatique qui réalise ce travail. La première chose à remarquer est que le système doit avoir une information sur la vitesse réelle du train. En conduite manuelle cette information est l'observation directe du train par le conducteur. Si cette vitesse était toujours proportionnée à la tension sur les rails tout serait simples mais ce n'est pas le cas. Il faudra, pour maintenir la vitesse, délivrer un courant plus fort par exemple dans une rampe. Une alimentation traditionnelle permet juste de contrôler la tension sur les rails mais cette tension ne donne pas toujours la même vitesse selon les besoins du trains.
Il faut donc un moyen de mesurer la vitesse effective de notre convoi miniature. À partir de cette information on peut envisager de corriger de manière automatique la tension délivrée au train.
Il faut donc un moyen de mesurer la vitesse effective de notre convoi miniature. À partir de cette information on peut envisager de corriger de manière automatique la tension délivrée au train.
Mesure de la vitesse effective du train miniature
Il est impensable de mettre des radars pour faire cette mesure de vitesse ! Impensable aussi de mettre un capteur dans chaque loco afin de fournir cette information (place du capteur, comment renvoyer l'information, etc.). Une solution connue depuis fort longtemps consiste à utiliser le moteur de la locomotive comme capteur de la vitesse ! Lorsqu'une motrice n'est plus alimenté en courant, elle continue à rouler un bref instant sur son élan. Durant cette phase, le moteur se comporte comme une dynamo et produit une tension que l'on retrouve donc sur les rails.
La mesure de vitesse peut être réalisée de la façon suivante : on coupe un très bref instant l'alimentation du train et pendant ce laps de temps on mesure la tension fournie par le moteur aux bornes des rails. Les circuits électroniques sont capables de réaliser cette coupure et mesure très rapidement et de manière répétitive de façon à posséder en permanence une information sur la vitesse réelle du train. La coupure de courant est tellement brève qu'elle n'affecte en rien le mouvement de la rame. La tension produite par le moteur en rotation s'appelle Force contre électro-motrice (FCEM). Lorsque le moteur n'est plus alimenté c'est une force electromotrice (FEM), simple question de vocabulaire. Cette FCEM est exprimée en Volt.
La mesure de vitesse peut être réalisée de la façon suivante : on coupe un très bref instant l'alimentation du train et pendant ce laps de temps on mesure la tension fournie par le moteur aux bornes des rails. Les circuits électroniques sont capables de réaliser cette coupure et mesure très rapidement et de manière répétitive de façon à posséder en permanence une information sur la vitesse réelle du train. La coupure de courant est tellement brève qu'elle n'affecte en rien le mouvement de la rame. La tension produite par le moteur en rotation s'appelle Force contre électro-motrice (FCEM). Lorsque le moteur n'est plus alimenté c'est une force electromotrice (FEM), simple question de vocabulaire. Cette FCEM est exprimée en Volt.
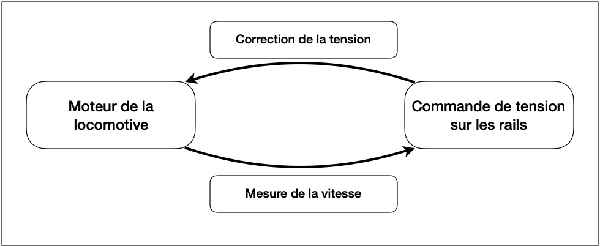
Le schéma ci-contre montre ce qu'on appelle une boucle d'asservissement. On dispose d'une commande qui permet d'agir sur la vitesse (commande de tension sur les rails) Cette commande agit sur le moteur de la locomotive. C'est ce qui constitue une commande classique. L'asservissement consiste à mettre en place la flèche de retour d'information qui indique à la commande la vitesse réelle. La commande dispose donc d'une information permettant de guider son action sur le train.
Nous avons vu que les alimentations à courant haché sont préférables aux alimentations à courant continu. Dans ce cas la commande de vitesse est réalisée en jouant sur le rapport cyclique de la PWM et non pas sur la tension maximum des créneaux. Le changement du rapport cyclique modifie de fait la tension moyenne au bornes des rails. Sur nos alimentations, ceci est réalisé de manière numérique et non pas analogique. La PWM est obtenu par un micro-contrôleur PIC. Ce dernier récupère sur une entrée la valeur de la FCEM venant des rails. C'est le programme du PIC qui calcule en permanence le rapport cyclique de la PWM pour maintenir la vitesse constante.
Nous avons vu que la mesure de vitesse nécessite de couper le courant un bref instant afin que sur les rails ne subsiste que la tension de la FCEM. Une idée qui vient de prime abord est de profiter des créneaux bas (à zéro) pour faire cette mesure. Il faut cependant faire attention car le circuit du moteur présente une résistance interne et une inductance qui ont pour effet de maintenir le courant de traction un court laps de temps après le créneau haut. Il faut donc attendre un bref intervalle de temps que ce courant disparaisse afin de n'avoir plus que la FCEM du moteur. Si les créneaux bas sont trop courts, le courant d'alimentation n'a pas le temps de s'annuler totalement et la mesure de la FCEM, donc de la vitesse, s'avère impossible.
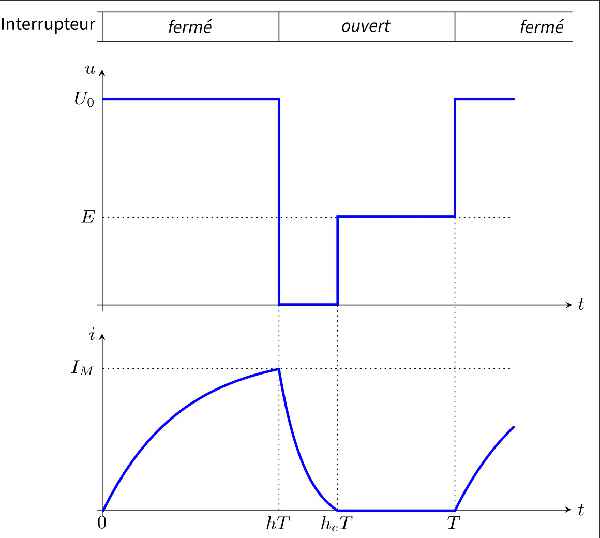
Le cas de la conduction discontinue : la courbe du haut représente la tension aux rails. Au moment où le créneau passe à zéro, le courant met un certain temps pour revenir à zéro. Ceci arrive ici au point marqué hcT. À partir de cet instant et jusqu'au créneau suivant la tension E aux rails (ou au moteur) est la FCEM et on peut la mesurer
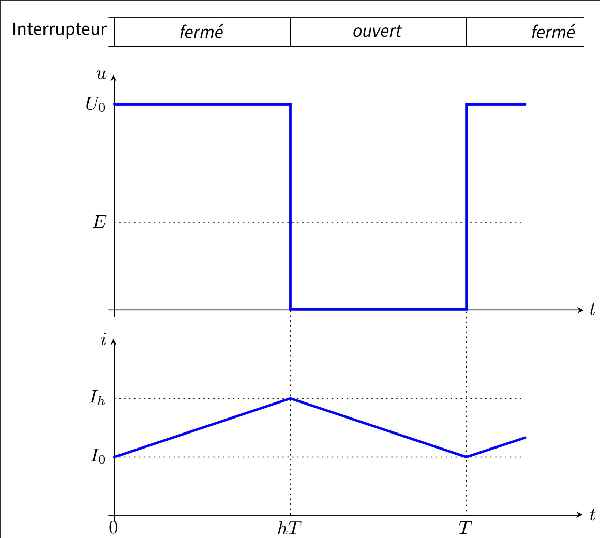
Le cas de la conduction continue : la courbe du haut représente la tension aux rails. Au moment où le créneau passe à zéro, le courant met trop de temps pour revenir à zéro. Ceci n'arrive jamais et le créneau suivant survient avant. Il est alors impossible de mesurer la FCEM.
Les schémas suivant représentent les deux situations nommées Conduction discontinue et Conduction continue.
Résolution du problème de lecture de la vitesse
En réalité, l'idée séduisante de mesure de la vitesse dans le créneau bas ne fonctionne pas du tout ! Nous avons vu que la fréquence de la PWM devait être assez élevée pour éviter la surchauffe du moteur voire sa destruction ! Avec la fréquence de 32 kHz retenue nous sommes toujours dans le schéma 2 de la conduction continue. La solution qu'y s'impose alors est de réaliser une interruption spécifique de la PWM pour cette mesure de vitesse. Ceci n'est pas compliqué à réaliser étant donné que c'est le programme du PIC qui va gérer cela. Cette solution offre de plus plusieurs avantages. Nous n'avons pas à nous soucier de la longueur du créneau à zéro qui est de taille variable dans la conduction discontinue. Cette longueur dépend du reste du type de moteur avec le risque que pour certains modèles la mesure ne devienne impossible. Ici on peut par programme déterminer de manière optimale et constante la durée de l'interruption et sa fréquence. Il n'est pas du tout nécessaire de mesurer le vitesse à la fréquence de 32 kHz. C'est bien suffisant de le faire à la fréquence de 100 Hz, valeur que nous avons retenue. La vitesse est ainsi mesurée 100 fois pas seconde.
Le calcul de l'asservissement
L'asservissement en lui même est déterminé par un programme dans le micro-contrôleur de la carte qui alimente le train. Ce circuit récupère en entrée une valeur donnant la vitesse instantanée du train (notée V). Il a aussi en entrée une valeur numérique qui est la vitesse demandée par le conducteur et que l'on nomme la consigne (notée C). En sortie le processeur donne une valeur numérique indiquant le réglage de la PWM, plus précisément le rapport cyclique déterminant la tension moyenne aux bornes du moteur (notée Um). Le problème de l'asservissement est de calculer en permanence la valeur de Um à partir de V et de C, le but étant que V soit le plus près possible de la consigne C. Dans la suite de cette présentation on va supposer que la consigne est fixe, c'est-à-dire que le conducteur souhaite garder une vitesse constante. Il faut faire coller V à cette consigne en surveillant la valeur de V.
La méthode la plus élémentaire est de calculer C – V . Il s'agit d'un nombre pouvant être positif ou négatif selon que la vitesse réelle est au dessous ou au dessus de la consigne. On détermine Um en utilisant cette différence multipliée par un coefficient fixe Gp. C'est ce qui s'appelle un asservissement proportionnel. Cette façon de faire présente un inconvénient. Si C – V est trop petit, la valeur de Um, bien que non nulle, peut devenir insuffisante pour faire tourner le moteur. En effet, en dessous d'un certain seuil, le moteur va s'arrêter de tourner alors que la consigne n'est pas atteinte car les moteurs ne tournent que pour une valeur suffisante de la tension. Une augmentation trop importante du coefficient Gp entraîne un phénomène nommé pompage qui se traduit par une marche saccadée du train. L'asservissement n'arrive pas à se stabiliser et oscille entre deux valeurs.
Pour remédier à cela on procède de la façon suivante. À chaque lecture de la vitesse — c'est-à-dire 100 fois par seconde — on cumule dans une variable la différence C – V multiplié par un coefficients Gi puis on ajoute C–V multiplié par le coefficient Gp. À chaque mesure de vitesse le programme calcule donc les deux formules :
La méthode la plus élémentaire est de calculer C – V . Il s'agit d'un nombre pouvant être positif ou négatif selon que la vitesse réelle est au dessous ou au dessus de la consigne. On détermine Um en utilisant cette différence multipliée par un coefficient fixe Gp. C'est ce qui s'appelle un asservissement proportionnel. Cette façon de faire présente un inconvénient. Si C – V est trop petit, la valeur de Um, bien que non nulle, peut devenir insuffisante pour faire tourner le moteur. En effet, en dessous d'un certain seuil, le moteur va s'arrêter de tourner alors que la consigne n'est pas atteinte car les moteurs ne tournent que pour une valeur suffisante de la tension. Une augmentation trop importante du coefficient Gp entraîne un phénomène nommé pompage qui se traduit par une marche saccadée du train. L'asservissement n'arrive pas à se stabiliser et oscille entre deux valeurs.
Pour remédier à cela on procède de la façon suivante. À chaque lecture de la vitesse — c'est-à-dire 100 fois par seconde — on cumule dans une variable la différence C – V multiplié par un coefficients Gi puis on ajoute C–V multiplié par le coefficient Gp. À chaque mesure de vitesse le programme calcule donc les deux formules :
Cumul = Cumul + Gi( C – V)
Um = Cumul + Gp(C – V)
La valeur de Um est la tension moyenne délivrée au moteur (rapport cyclique de la PWM). On voit que si C – V est non nul, l'accumulation dans la variable Cumul va finir par donner une tension suffisante pour faire tourner le moteur. Ce dernier ne va donc s'arrêter que si la consigne prend la valeur 0, d'où l'obtention de ralentis exceptionnels. La variable Cumul produit un effet de mémoire des différentes mesures effectuées précédemment, tandis que l'on ajoute le terme Gp(C – V) nouveau à chaque étape.
Un tel asservissement utilise un terme que l'on nomme intégral, celui résultant du cumul auquel est ajouté un terme simplement proportionnel. On parle d'asservissement Proportionnel-Intégral ou encore d'asservissement PI.
Les paramètres Gp et Gi sont respectivement nommés gain proportionnel et gain intégral. Ils jouent un rôle fondamental dans le bon fonctionnement du système pour une marche régulière du train. Nous expliquons dans le paragraphe suivant comment les régler. Le calcul de l'asservissement est entièrement sous forme de programme donc facile à modifier et paramétrer ce qui n'est pas le cas avec un asservissement analogique.
Un tel asservissement utilise un terme que l'on nomme intégral, celui résultant du cumul auquel est ajouté un terme simplement proportionnel. On parle d'asservissement Proportionnel-Intégral ou encore d'asservissement PI.
Les paramètres Gp et Gi sont respectivement nommés gain proportionnel et gain intégral. Ils jouent un rôle fondamental dans le bon fonctionnement du système pour une marche régulière du train. Nous expliquons dans le paragraphe suivant comment les régler. Le calcul de l'asservissement est entièrement sous forme de programme donc facile à modifier et paramétrer ce qui n'est pas le cas avec un asservissement analogique.
Réglage des paramètres de l'asservissement
Les paramètres Gp et Gi de l'asservissement jouent un rôle important dans le comportement du moteur. S'ils sont trop faibles, l'asservissement est mou, c'est-à-dire que la vitesse n'est pas corrigée rapidement en cas d'effort à fournir (pente, etc). Si ils sont trop élevés, un phénomène de pompage déjà évoqué ci-dessus provoque une marche saccadée.
Pour trouver les paramètres optimaux on commence par ne rendre actif que le gain proportionnel en mettant Gi à 0. On part alors avec Gp à zéro et on l'augmente jusqu'à rencontrer le pompage. On choisi Gp le plus grand possible n'assurant pas le pompage. Une fois réglé Gp on procède de la même façon pour trouver Gi. Ces réglages se font visuellement en faisant rouler la locomotive, notre système autorisant la modification de ces paramètres pendant le fonctionnement. On procède de préférence avec la locomotive haut-le-pied car le phénomène de pompage y est alors plus sensible qu'avec une rame chargée.
Pour trouver les paramètres optimaux on commence par ne rendre actif que le gain proportionnel en mettant Gi à 0. On part alors avec Gp à zéro et on l'augmente jusqu'à rencontrer le pompage. On choisi Gp le plus grand possible n'assurant pas le pompage. Une fois réglé Gp on procède de la même façon pour trouver Gi. Ces réglages se font visuellement en faisant rouler la locomotive, notre système autorisant la modification de ces paramètres pendant le fonctionnement. On procède de préférence avec la locomotive haut-le-pied car le phénomène de pompage y est alors plus sensible qu'avec une rame chargée.
En principe ce réglage est à faire pour chaque type de locomotive ou du moins pour chaque type de moteur. Les moteurs à rotor sans fer ne pose pas de problèmes spécifiques mais nécessitent des réglages des deux gains sensiblement différents. Si ces paramètres sont correctement définis, les moteurs RSF réagissent fort bien à l'asservissement.
Une conséquence de cela est qu'il faut ajuster l'alimentation pour chaque locomotive et que cela deviendrait fastidieux s'il fallait recommencer l'opération à chaque mise en service du réseau. Notre système étant totalement numérique (sans pour autant être en DCC !) les différents paramètres sont mémorisés de manière permanente pour chaque loco. Il est vrai que nos cartes de commande des trains s'inscrivent dans un contexte de cab-control numérique dont on ne donne pas le détail ici, déjà abordé dans des pages précédentes citées en tête d'article. Ce contexte prend en charge la mémorisation des paramètres de chaque motrice.
Une conséquence de cela est qu'il faut ajuster l'alimentation pour chaque locomotive et que cela deviendrait fastidieux s'il fallait recommencer l'opération à chaque mise en service du réseau. Notre système étant totalement numérique (sans pour autant être en DCC !) les différents paramètres sont mémorisés de manière permanente pour chaque loco. Il est vrai que nos cartes de commande des trains s'inscrivent dans un contexte de cab-control numérique dont on ne donne pas le détail ici, déjà abordé dans des pages précédentes citées en tête d'article. Ce contexte prend en charge la mémorisation des paramètres de chaque motrice.
Asservissements PID
Nous avons indiqué que nos cartes d'alimentation des trains étaient équipées d'un asservissement de la vitesse de type PI (proportionnel-intégral). Ceux qui connaissent un peu ces notions savent qu'il existe des asservissements de type PID ajoutant un terme supplémentaire correspondant à la dérivée de C – V. L'intérêt des asservissements PID est d'avoir un système plus réactif aux variations rapides de la consigne. Par exemple si l'on asservit le freinage d'urgence d'une voiture à un paramètre fourni par un capteur de proximité d'une autre voiture, il faudra que le système réagisse très vite lorsque la commande va subitement être modifiée. Dans notre cas une telle situation n'existe pas, la consigne qui est en fait donnée par le conducteur du train n'évolue que relativement lentement. Une commande d'arrêt d'urgence vient prendre la main si besoin. En règle générale, on ne souhaite pas faire varier très rapidement la vitesse du train. Même, on instaure par le programme une simulation de l'inertie afins de rendre la lourdeur des convois réels et ralentir les demandes brutales de l'utilisateur. Dans notre contexte d'utilisation, la réactivité du système PI est très largement suffisante.
De plus nos cartes électroniques de commande sont centralisées en un point et reliées aux différents cantons par des longueurs de fils pouvant atteindre 5 à 6 m. Ces longueurs de fils captent des signaux parasites transitoires qui seraient amplifiés par le terme dérivé D d'un asservissement PID. Le ssytème PI est donc préférable en tous points. Il répond exactement aux besoins et n'amplifie pas les signaux parasites.
Notons un point de terminologie. Le terme d'asservissement est le plus souvent utilisé par les professionnels pour faire référence à un système qui suit les variations d'une consigne évoluant beaucoup, voire rapidement, avec en général utilisation d'un asservissement PID. Ici le but de notre asservissement est surtout d'éliminer les variations de vitesse dues à la charge fluctuante selon les endroits du réseau. Bien entendu ce système réagit aussi à la consigne de vitesse donnée par l'utilisateur sans que ce soit son rôle principal. Dans ce contexte on parle plutôt de régulateur de vitesse.
De plus nos cartes électroniques de commande sont centralisées en un point et reliées aux différents cantons par des longueurs de fils pouvant atteindre 5 à 6 m. Ces longueurs de fils captent des signaux parasites transitoires qui seraient amplifiés par le terme dérivé D d'un asservissement PID. Le ssytème PI est donc préférable en tous points. Il répond exactement aux besoins et n'amplifie pas les signaux parasites.
Notons un point de terminologie. Le terme d'asservissement est le plus souvent utilisé par les professionnels pour faire référence à un système qui suit les variations d'une consigne évoluant beaucoup, voire rapidement, avec en général utilisation d'un asservissement PID. Ici le but de notre asservissement est surtout d'éliminer les variations de vitesse dues à la charge fluctuante selon les endroits du réseau. Bien entendu ce système réagit aussi à la consigne de vitesse donnée par l'utilisateur sans que ce soit son rôle principal. Dans ce contexte on parle plutôt de régulateur de vitesse.
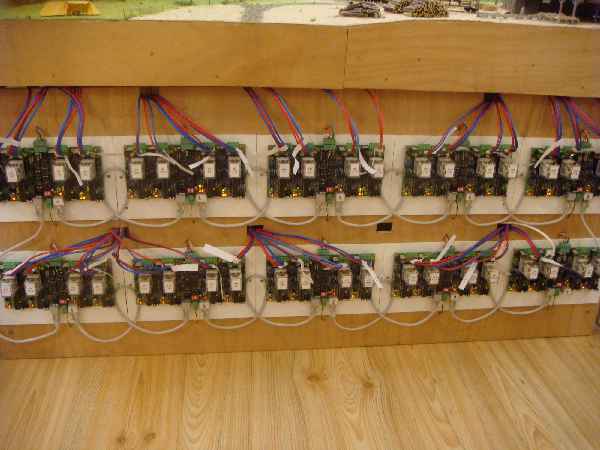
Les dix cartes de commande des trains sont centralisées et reliées au réseau par des longueurs de fils non négligeables.
Commande de trains par asservissement dans le commerce et ailleurs
On trouve ici ou là des alimentations qui répondent à ces principes sans pour autant aller au fond des choses ni donner les moyens de fonctionnement corrects pour tous les types de locomotives. Certaines alimentations sont purement analogiques et l'asservissement joue sur une tension de sortie et non pas sur le rapport cyclique d'une PWM. D'autres jouent sur ce paramètre mais l'asservit de manière analogique ce qui rend difficile d'implémenter le terme intégral. En se procurant une alimentation à asservissement il est bon de s'assurer des poinst suivants :
— la vitesse du train est contôlée par une PWM à fréquence fixe et à rapport cyclique contrôlé par l'asservissement ;
— la fréquence de la PWM est élevée (au moins 20 kHz) ;
— l'asservissement est de type PI ;
— il est possible d'ajuster les gains proportionnel et intégral Gp et Gi à la demande pour chaque loco.
Si l'alimentation doit piloter plusieurs locomotives de moteurs assez différents il serait bon de pouvoir facilement mémoriser les réglages de Gp et Gi pour chaque loco. Il ne faut cependant pas trop rêver, les informations techniques concernant ce type de matériel est en général assez réduit ! Les concepteurs eux-mêmes n'ont pas toujours une compétence aigüe dans le domaine. Pour s'en convaincre il suffit de voir des discussions sans fin sur certains forums autour de ces sujets, les divergences de vues étant souvent causées par une méconnaissance de la théorie des asservissements et des caractéristiques des alimentations concernées.
Difficile de ne pas dire un mot des asservissements de vitesses avec le système DCC. Il est possible de réaliser cette fonction de régulation de la vitesse au niveau du décodeur embarqué dans la locomotive car il dispose de toutes les données pour cela. Certains décodeurs propose bien sûr la régulation de vitesse (la compensation de charge, c'est ainsi qu'est nommée la régulation de vitesse dans le monde DCC). Plusieurs difficultés cependant surviennent. D'abord la compensation de charge, ne fait pas partie des normes DCC. C'est une extension qui n'est pas totalement normalisée et qui n'existe donc pas sur tous les décodeurs. Lorsqu'elle existe, la documentation technique est en générale très insuffisante et l'on n'entend pas parler de gain proportionnel et de gain intégral. J'ai trouvé un document technique d'une grande marque conseillant de faire des réglages en modifiant trois variables de configurations sans indiquer la signification exacte de ces variables ni de méthodologie pour les définir. Le conseil donné est du genre « à force d'essayer vous y arriverez », ce qui rappelle un principe Shadock bien connu ! Avec 3 valeurs cela fait pas mal d'essais ! Étant donnée l'absence de normes sur cette question, les variables de configurations à trifouiller ne sont pas toujours les mêmes d'un fabricant à l'autre (et même d'une famille de décodeurs à l'autre chez le même fabricant). La documentation ne les indique pas toujours. Pas étonnant dans ces conditions que certains amateurs constatent un fonctionnement désastreux avec certains moteurs.
La difficulté est sans doute lorsqu'on veut équiper soi-même une locomotive pour le DCC. Si la locomotive est achetée directement équipée en DCC, le décodeur a été choisi par le fabricant et l'on peut espéré que la loco est déjà paramétrée pour un comportement optimal. Par contre, l'avantage en DCC sur des alimentations autonomes est qu'au moins les paramètres sont mémorisés dans le dééodeur et peuvent être adaptés à chaque locomotive.
Le réseau du TMRC, mis en place en 1946-47 par des étudiants du MIT utilise actuellement une alimentation de vitesse asservie assez similaire à la notre. Cependant la description de leurs sytème ne fait pas référence au type d'asservissements. Il ne semble pas qu'ils utilisent un terme intégral dans leur montage ni que les réglages soient facilement adaptables et mémorisables dans le système. Par ailleurs la PWM utilisée est à basse fréquence (60 Hz). Cependant, c'est la seule réalisation assez proche de la notre que nous ayons rencontrée.
Enfin pour terminer ce paragraphe citons le travail de l'AMFN qui a réalisé une alimentation asservie et en donne le plan de montage. Il faut noter que c'est une alimentation purement analogique travaillant avec une tension à la période de 100 Hz donc sujette à surchauffer les petits moteurs. D'autres réalisations du club sont mentionnées ici. Il est à noter que les solutions que nous venons de présenter dans cette page répondent à tous les problèmes listés sur la page de l'AMFN susmentionnée.
Signalons enfin le travail important, rare et sérieux réalisé par Jonathan Scott, amateur de trains miniatures ayant développé de nombreuses alimentations utilisant les principes que nous décrivons ici. On trouve sur ses pages de nombreux documents, des desciptions et des plans.
— la vitesse du train est contôlée par une PWM à fréquence fixe et à rapport cyclique contrôlé par l'asservissement ;
— la fréquence de la PWM est élevée (au moins 20 kHz) ;
— l'asservissement est de type PI ;
— il est possible d'ajuster les gains proportionnel et intégral Gp et Gi à la demande pour chaque loco.
Si l'alimentation doit piloter plusieurs locomotives de moteurs assez différents il serait bon de pouvoir facilement mémoriser les réglages de Gp et Gi pour chaque loco. Il ne faut cependant pas trop rêver, les informations techniques concernant ce type de matériel est en général assez réduit ! Les concepteurs eux-mêmes n'ont pas toujours une compétence aigüe dans le domaine. Pour s'en convaincre il suffit de voir des discussions sans fin sur certains forums autour de ces sujets, les divergences de vues étant souvent causées par une méconnaissance de la théorie des asservissements et des caractéristiques des alimentations concernées.
Difficile de ne pas dire un mot des asservissements de vitesses avec le système DCC. Il est possible de réaliser cette fonction de régulation de la vitesse au niveau du décodeur embarqué dans la locomotive car il dispose de toutes les données pour cela. Certains décodeurs propose bien sûr la régulation de vitesse (la compensation de charge, c'est ainsi qu'est nommée la régulation de vitesse dans le monde DCC). Plusieurs difficultés cependant surviennent. D'abord la compensation de charge, ne fait pas partie des normes DCC. C'est une extension qui n'est pas totalement normalisée et qui n'existe donc pas sur tous les décodeurs. Lorsqu'elle existe, la documentation technique est en générale très insuffisante et l'on n'entend pas parler de gain proportionnel et de gain intégral. J'ai trouvé un document technique d'une grande marque conseillant de faire des réglages en modifiant trois variables de configurations sans indiquer la signification exacte de ces variables ni de méthodologie pour les définir. Le conseil donné est du genre « à force d'essayer vous y arriverez », ce qui rappelle un principe Shadock bien connu ! Avec 3 valeurs cela fait pas mal d'essais ! Étant donnée l'absence de normes sur cette question, les variables de configurations à trifouiller ne sont pas toujours les mêmes d'un fabricant à l'autre (et même d'une famille de décodeurs à l'autre chez le même fabricant). La documentation ne les indique pas toujours. Pas étonnant dans ces conditions que certains amateurs constatent un fonctionnement désastreux avec certains moteurs.
La difficulté est sans doute lorsqu'on veut équiper soi-même une locomotive pour le DCC. Si la locomotive est achetée directement équipée en DCC, le décodeur a été choisi par le fabricant et l'on peut espéré que la loco est déjà paramétrée pour un comportement optimal. Par contre, l'avantage en DCC sur des alimentations autonomes est qu'au moins les paramètres sont mémorisés dans le dééodeur et peuvent être adaptés à chaque locomotive.
Le réseau du TMRC, mis en place en 1946-47 par des étudiants du MIT utilise actuellement une alimentation de vitesse asservie assez similaire à la notre. Cependant la description de leurs sytème ne fait pas référence au type d'asservissements. Il ne semble pas qu'ils utilisent un terme intégral dans leur montage ni que les réglages soient facilement adaptables et mémorisables dans le système. Par ailleurs la PWM utilisée est à basse fréquence (60 Hz). Cependant, c'est la seule réalisation assez proche de la notre que nous ayons rencontrée.
Enfin pour terminer ce paragraphe citons le travail de l'AMFN qui a réalisé une alimentation asservie et en donne le plan de montage. Il faut noter que c'est une alimentation purement analogique travaillant avec une tension à la période de 100 Hz donc sujette à surchauffer les petits moteurs. D'autres réalisations du club sont mentionnées ici. Il est à noter que les solutions que nous venons de présenter dans cette page répondent à tous les problèmes listés sur la page de l'AMFN susmentionnée.
Signalons enfin le travail important, rare et sérieux réalisé par Jonathan Scott, amateur de trains miniatures ayant développé de nombreuses alimentations utilisant les principes que nous décrivons ici. On trouve sur ses pages de nombreux documents, des desciptions et des plans.
Utilisation de notre alimentation avec les locomotives du commerce
L'un des avantages des cartes d'alimentation de mon réseau est que si tout mon système est numérique, en fin de compte les locomotives sont, quant à elles, toutes anlogiques ! C'est moins cher et l'on reste maître du système ! Il faut cependant indiquer qu'en général l'arrivée d'une nouvelle locomotive dans mon parc nécessite d'abord un passage à l'atelier. Le problème est que les modèles modernes, même en version analogique, comportent un certain nombre de composants électroniques sur une platine interne, composants qui parfois peuvent perturber le fonctionnment de ma régulation de vitesse. Il faut en particulier faire la chasse à tous les condensateurs et inductances de filtrage placées aux bornes du moteurs et qui vont avoir tendance à lisser le courant et fausser la lecture de la FCEM. En règle générale je supprime ces composants et je les remplace par une diode Transil apte à absorber les surtensions lors de faux contacts sur les rails sans pour autant avoir une influence sur la régulation. On trouvera plusieurs exemples dans mes pages de ces transformations dans la rubrique Locomotives de l'index général.
On touche là des problèmes assez complexes qui nécessitent de la précision. Ce travail a nécessité des études théoriques assez poussées qui ne sont pas développées ici, et cette démarche a été confirmée par cette réalisation concrète qui fonctionne depuis 2010 environ ainsi que sur les réseaux de Pierre et Jean-Luc
J'ai bien été épaulé dans ce domaine par Pierre qui m'a beaucoup appris et sans qui cette page n'existerait pas. L'électronique de commande de mon réseau est complexe, comme le montre les 10 cartes sur la photo qui suit. Elles permettent d'alimenter 40 cantons ou zones de détection (aiguilles), assure la régulation de vitesse mais aussi la détection de présence sensible à 100kΩ, la sélection du sens de marche, la protection contre les courts-circuits par disjoncteur électronique et fusible, la simulation de l'inertie, la gestion d'une zone d'arrêt en fin de canton. Chaque carte a demandé 2 jours complet de travail juste pour souder tous les composants, à raison de 8 heures par jour, et plusieurs années à Pierre pour la conception l'étude et la mise au point avec plusieurs prototypes.
Nous n'avons pas parlé ici du système de commande global du réseau utilisant le vieux principe remis au goût du jour du CAB-Control, ce qui conduit à réaliser 40 alimentations identiques pour piloter chaque canton. Bien sûr cette page peut aider à la réalisation d'une seule alimentation fonctionnant dans un contexte plus simple.
En espérant que cette page puisse aider ceux qui seraient tenté par l'aventure de la création de leur propre alimentation ou simplement les aider à faire leur choix lors d'un achat.
J'ai bien été épaulé dans ce domaine par Pierre qui m'a beaucoup appris et sans qui cette page n'existerait pas. L'électronique de commande de mon réseau est complexe, comme le montre les 10 cartes sur la photo qui suit. Elles permettent d'alimenter 40 cantons ou zones de détection (aiguilles), assure la régulation de vitesse mais aussi la détection de présence sensible à 100kΩ, la sélection du sens de marche, la protection contre les courts-circuits par disjoncteur électronique et fusible, la simulation de l'inertie, la gestion d'une zone d'arrêt en fin de canton. Chaque carte a demandé 2 jours complet de travail juste pour souder tous les composants, à raison de 8 heures par jour, et plusieurs années à Pierre pour la conception l'étude et la mise au point avec plusieurs prototypes.
Nous n'avons pas parlé ici du système de commande global du réseau utilisant le vieux principe remis au goût du jour du CAB-Control, ce qui conduit à réaliser 40 alimentations identiques pour piloter chaque canton. Bien sûr cette page peut aider à la réalisation d'une seule alimentation fonctionnant dans un contexte plus simple.
En espérant que cette page puisse aider ceux qui seraient tenté par l'aventure de la création de leur propre alimentation ou simplement les aider à faire leur choix lors d'un achat.
En guise de conclusion
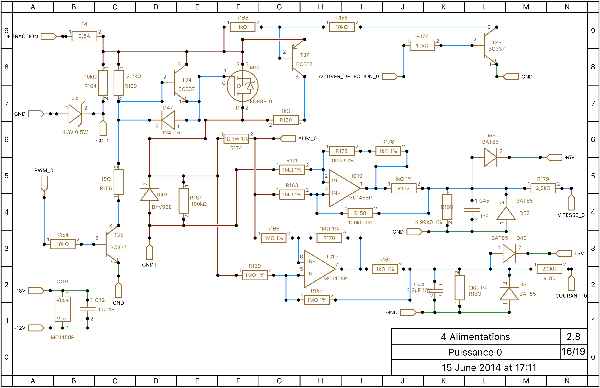
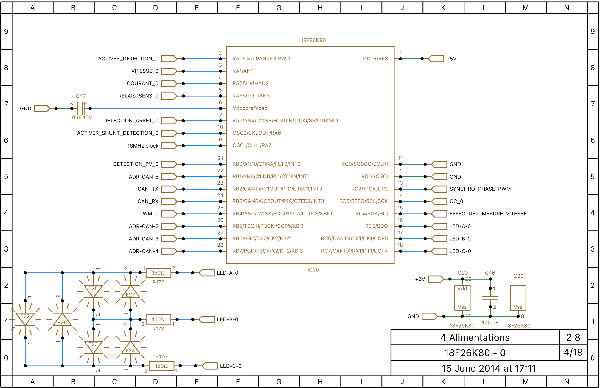
Le schéma électronique
Voici le schéma principal de la carte d'alimentation d'un canton. Ce module figure en quatre exemplaires sur chaque carte afin de piloter 4 cantons à la fois.
Pour chaque module d'alimentation il y a un microcontroleur PIC 26K80 qui gère les différents signaux et calcule l'asservissement.
Cliquer sur les vues pour agrandir (comme pour toutes les images du site).
Cliquer sur les vues pour agrandir (comme pour toutes les images du site).
Toute la carte ne figure pas ici, en particulier la partie concernant la détection de présence qui est un tout autre problème et l'interface du bus CAN servant à la communication avec les autres cartes et la carte maître.
Quelques données numériques
La locomotive Roco BR220 (échelle N) a un moteur qui présente une résistance de 13 Ω environ et une inductance L = 0,59mH. Entraînant huit wagons sous une tension de 7, 5 V continu, elle consomme un courant d’environ 355 mA.
Les calculs donnent alors la puissance électrique absorbée de 2,66W, la puissance mécanique fournie de 1,02 W et les pertes par effet Joule 1,64 W. Plus de 60% de la puissance électrique est perdue par effet Joule, donc échauffement (c’est très important : un moteur industriel de quelques kW présente habituellement des pertes inférieures à 10%).
Le point de fonctionnement est déterminé par la puissance mécanique fournie (1,02 W) et par la FCEM (2,89V). Ces deux valeurs fixent la vitesse du train et la puissance de traction qu'il développe. Ce sont les données intéressantes pour faire des comparaisons.
Des mesures sous tensions hachées avec le même point de fonctionnement ont été réalisées :
La locomotive Roco BR220 (échelle N) a un moteur qui présente une résistance de 13 Ω environ et une inductance L = 0,59mH. Entraînant huit wagons sous une tension de 7, 5 V continu, elle consomme un courant d’environ 355 mA.
Les calculs donnent alors la puissance électrique absorbée de 2,66W, la puissance mécanique fournie de 1,02 W et les pertes par effet Joule 1,64 W. Plus de 60% de la puissance électrique est perdue par effet Joule, donc échauffement (c’est très important : un moteur industriel de quelques kW présente habituellement des pertes inférieures à 10%).
Le point de fonctionnement est déterminé par la puissance mécanique fournie (1,02 W) et par la FCEM (2,89V). Ces deux valeurs fixent la vitesse du train et la puissance de traction qu'il développe. Ce sont les données intéressantes pour faire des comparaisons.
Des mesures sous tensions hachées avec le même point de fonctionnement ont été réalisées :
En tension haché à la fréquence de 100 Hz sous 9 V pour un courant de 470 mA, la puissance électrique absorbée est de 3,19 W et la puissance perdue en chaleur dans le moteur de 2,16 W. Cette dernière perte est à comparer à celle en continue de 1,64 W qui était déjà importante.
En tension haché à la fréquence de 20 kHz sous 12 V pour un courant de 228 mA on a une puissance électrique consommé de 2,80 W et une perte par chauffement de 1,70 W (toujours bien sûr avec le même point de fonstionnement). On constate que l'échauffement est similaire à celui en courant continu et bien inférieure à celle en basse fréquence.
Sous 40 kHz, la perte par effet Joule baisse encore à 1,65 W, pour le même point de fonctionnement.
Pierre a rédigé un document technique avec tous les calculs aboutissant à ces résultats.
En tension haché à la fréquence de 20 kHz sous 12 V pour un courant de 228 mA on a une puissance électrique consommé de 2,80 W et une perte par chauffement de 1,70 W (toujours bien sûr avec le même point de fonstionnement). On constate que l'échauffement est similaire à celui en courant continu et bien inférieure à celle en basse fréquence.
Sous 40 kHz, la perte par effet Joule baisse encore à 1,65 W, pour le même point de fonctionnement.
Pierre a rédigé un document technique avec tous les calculs aboutissant à ces résultats.