C00 — Une carte d'essai de moteurs sans balais
jeudi 16 septembre 2021
Cette carte n'a pas vocation à directement servir sur le réseau car elle ne comporte pas d'interface CAN. Elle a pour objectif d'apprendre à commander et tester des moteurs sans balais (venant de disques durs). J'avais de manière analogue appris à piloter des moteurs pas-à-pas ce qui m'a bien été utile pour le passage à niveau et l'éolienne. Ces moteurs qui comportent 4 plots de branchement ou parfois 3, ne peuvent être testés facilement avec une alimentation ordinaire. Ils présentent l'avantage d'être sans balais, donc très silencieux de fonctionnement.
La réalisation d'une carte de pilotage d'horloges Lepaute m'a conduit à occuper une portion de circuit imprimé libre afin d'économiser la surface (voir article précédent). Sur cette bande de circuit imprimé j'ai réalisé une petite carte me permettant d'alimenter des moteurs de récupération provenant de disques durs. J'ai en effet démonté de nombreux disques durs hors d'usage, au départ surtout pour récupérer les aimants sur-puissants au néodyme, mais j'ai bien sûr au passage conservé ausi les moteurs. Je sais à présent faire fonctionner les moteurs sans balais (brushless motor). Cela justifie en soit la réalisation de cette petite carte.
La réalisation d'une carte de pilotage d'horloges Lepaute m'a conduit à occuper une portion de circuit imprimé libre afin d'économiser la surface (voir article précédent). Sur cette bande de circuit imprimé j'ai réalisé une petite carte me permettant d'alimenter des moteurs de récupération provenant de disques durs. J'ai en effet démonté de nombreux disques durs hors d'usage, au départ surtout pour récupérer les aimants sur-puissants au néodyme, mais j'ai bien sûr au passage conservé ausi les moteurs. Je sais à présent faire fonctionner les moteurs sans balais (brushless motor). Cela justifie en soit la réalisation de cette petite carte.
Un exemplaire de moteur sans balais provenant d'un disque dur. On trouve des informations sur l'internet (éventuellement en anglais brushless motor).
Lorsqu'il y a 4 fils de sortie, 3 sont reliés à trois bobines identiques et le 4e à l'autre extrémité commune des 3 bobines. Une mesure à l'ohm-mètre permet facilement d'identifier le point commun. De ce point la résistance vers chacun des 3 autres est R et l'on trouve 2R comme résistance entre les fils 1, 2 et 3 pris 2 par 2. Les bobines sont montées en étoile.
Le nombre de moteurs récupérés justifie de pouvoir les essayer.
Les cartes à leur arrivée de JLCPCB
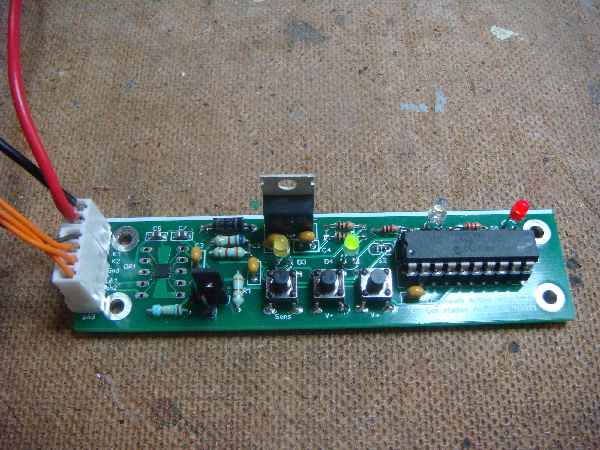
La carte en fonctionnement. Une led blanche clignote pour indiquer que le programme du PIC tourne bien. La led rouge allumée indique que le moteur est bien en phase avec la rotation imposée par l'électronique. Si elle clignote c'est que le moteur ne suit pas. La led verte s'allume plus ou moins fortement selon la vitesse demandée au moteur. Enfin la led jaune (éteinte sur la photo) indique le sens de marche demandé.
Les poussoirs permettent de déterminer le sens de marche et la vitesse.
Les poussoirs permettent de déterminer le sens de marche et la vitesse.
Les moteurs sans balais sont des moteurs synchrones dont le rotor est entraîné par un champ magnétique tournant obtenu par trois signaux déphasés entre eux de 120° et alimentant les 3 bobines. Il existe des circuits intégrés qui produisent ces tensions pour piloter ces moteurs. Certains composants produisent des signaux rectangulaires. J'ai basé ma carte sur le MTD6505 de Microchip. Les plus élaborés, comme celui-ci, donnent en sortie des signaux sinusoïdaux ce qui assure un fonctionnement extrêmement silencieux du moteur. Le schéma ci-dessus en donne l'utilisation (extrait des datasheets). Les trois bobines du moteurs sont reliées aux sortie OUT1, OUT2 et OUT3. L'entrée PWM permet le contrôle de la vitesse du moteur en faisant varier le rapport cyclique de la PWM (duty cycle). J'ai piloté cette entrée avec une PWM produite par le programme du PIC. L'entrée logique DIR change le sens de rotation. Ce sens dépend aussi de l'ordre de câblage des 3 bobines mais avec cette entrée on peut choisir le sens de rotation par le programme du PIC. L'entrée Rprog permet d'indiquer le type du moteur selon l'entrée sélectionnée parmi quatre (R2 peut prendre les valeurs 3.9 kΩ ou 24 kΩ ). Un strap à quatre positions me permet de sélectionner le type du moteur. Je réalise cette sélection par essais successifs. Le datasheet donne des éléments techniques plus raisonnés pour sélectionner le starp si l'on connaît les caractéristiques du moteur. La sortie FG permet de connaître le comportement du moteur. Si le moteur est en synchonisme avec la commande, FG est au niveau bas. En cas de désynchronisation, elle est en haute impédance. J'ai relié cette sortie à une led pour contrôle. Si la led clignote au lieu de s'allumer franchement le moteur ne suit pas.
Ce circuit n'a pas de sortie COM pour connecter le commun (fil 4) des trois bobines. J'ai laissé ce fil en l'air sur les moteurs qui en possèdent un. Lorsque les trois phases sont bien équilibrée, le courant circulant par ce fil est nul ce qui est à peu près vrai en général. Il n'y a pas d'inconvénient à laisser en l'air ce fil si l'on ne cherche pas à réaliser un pilotage très précis de la vitesse du moteur.
Lors des essais, il arrive que tout s'arrête, signe qu'une sécurité protégeant le circuit intégré s'est déclenchée. Ceci arrive si on provoque une sur-consommation de courant avec un moteur trop puissant ou si le moteur est bloqué en rotation, mais aussi lorsqu'on ne sélectionne pas le bon type de moteur avec le strap. Lorsque le problème est supprimé, le circuit redémarre tout seul. Le courant maximum sur les sorties OUT est de 1 A.
Ce petit montage me permet de tester facilement les moteurs que j'ai en réserve et si un jour j'ai besoin d'en utiliser un pour commander un mécanisme je saurai comment m'y prendre pour le faire tourner.
Ce circuit n'a pas de sortie COM pour connecter le commun (fil 4) des trois bobines. J'ai laissé ce fil en l'air sur les moteurs qui en possèdent un. Lorsque les trois phases sont bien équilibrée, le courant circulant par ce fil est nul ce qui est à peu près vrai en général. Il n'y a pas d'inconvénient à laisser en l'air ce fil si l'on ne cherche pas à réaliser un pilotage très précis de la vitesse du moteur.
Lors des essais, il arrive que tout s'arrête, signe qu'une sécurité protégeant le circuit intégré s'est déclenchée. Ceci arrive si on provoque une sur-consommation de courant avec un moteur trop puissant ou si le moteur est bloqué en rotation, mais aussi lorsqu'on ne sélectionne pas le bon type de moteur avec le strap. Lorsque le problème est supprimé, le circuit redémarre tout seul. Le courant maximum sur les sorties OUT est de 1 A.
Ce petit montage me permet de tester facilement les moteurs que j'ai en réserve et si un jour j'ai besoin d'en utiliser un pour commander un mécanisme je saurai comment m'y prendre pour le faire tourner.