C04 — Le mode manoeuvre
lundi 20 octobre 2025
Voilà un sujet régulièrement évoqué dans mes pages et jamais vraiment traité ! Et pour cause ce mode de fonctionnement des trains pose de nombreux problèmes, raison pour laquelle le sujet a toujours été reporté à plus tard. Rappelons que mes locomotives fonctionnent en analogique mais que l'ensemble du réseau est piloté de manière numérique, toute l'électronique et les programmes de commande étant en dehors des motrices. Le système utilisé est du type CAB-control comme celui de Pierre Chenevez dans les années 70, mais avec les technologies actuelles. L'alimentation d'un train avance de canton en canton au fur et à mesure de sa marche. Notre système n'est plus basé sur des relais pour commuter les alimentations mais est réalisé par programme au niveau de commandes logiques. Sans entrer dans les détails, ce programme, nommé Caniche par Pierre qui en est le concepteur, assure la commande manuelle indépendante des trains et la sécurité de marche de manière automatique. Un train est seul dans son canton et ne peut pas en rattraper un autre. Cette sécurité qui est parfaite pour faire circuler les trains en pleine voie fait, par contre, qu'il est impossible qu'une locomotive vienne atteler une rame arrêtée dans une voie. En effet, comme la voie va apparaitre occupée, tout accès y est interdit.
Voilà fort longtemps que nous avons étudié un mode de fonctionnement du logiciel qui autoriserait dans certaines conditions de s'affranchir de cette sécurité trop rigide pour manœuvrer.
Aujourd'hui une idée très prometteuse est à l'étude et cette page va la présenter et faire le point sur l'avancement de sa réalisation.
Voilà fort longtemps que nous avons étudié un mode de fonctionnement du logiciel qui autoriserait dans certaines conditions de s'affranchir de cette sécurité trop rigide pour manœuvrer.
Aujourd'hui une idée très prometteuse est à l'étude et cette page va la présenter et faire le point sur l'avancement de sa réalisation.
Cela étant, on souhaite ne pas avoir de contraintes supplémentaires de conduite. En particulier ou souhaite que le système continu de suivre une locomotive en manœuvre afin de toujours l'alimenter avec la même commande. On souhaite aussi lorsque la motrice reprend un train en ligne qu'elle puisse repasser en mode bloc automatique sans avoir à indiquer à l'électronique le canton où elle se trouve. Tout cela passe par un moyen de connaître l'emplacement de chaque motrice sur le réseau.
Supposons cette condition remplie et que le gestionnaire central sache où se trouve chaque locomotive. Il peut alors connaitre les informations suivantes :
— le nombre de locomotives susceptible de rouler si on alimente la zone ;
— s'il n'y a qu'une dans une zone donnée (locomotive active);
— tout changement de la locomotive active.
En effet ces informations peuvent se déduire de la position de chaque aiguille et de l'état des zones d'isolement commandées manuellement. On voit alors que lors d'une manœuvre, le système est capable de suivre une locomotive avec la commande logique qui lui convient et une fois la manœuvre terminée de replacer la dite locomotive sous le contrôle de Caniche en mode bloc automatique sans que l'utilisateur n'ait à réaliser une opération d'association de la loco avec un canton.
Reste à voir comment situer l'emplacement de chaque locomotive.
Il n'est pas nécessaire de connaître la place d'une motrice de manière extrêmement précise. En fait, ce qui importe, c'est sa position par rapport aux aiguilles (ou TJD) et aussi par rapport aux zones d'isolement. Pour cela on peut placer un capteur sensible au passage d'une motrice au niveau de chaque appareil de voie. Une locomotive va déclencher l'envoi d'un message vers le gestionnaire central lors de son passage sur chaque aiguille. Ce signal permet au système central de savoir dans quelle voie va se trouver la loco puisqu'il connait son sens de circulation et la position de l'aiguille. De proche en proche, le système central conserve ainsi l'emplacement de la motrice active. Si le système est correctement initialisé, il connait aussi l'emplacement des motrices inactives et il les tient à jour si l'une ou l'autre devient active. Il est important que les wagons ou voitures soient ignorés des capteurs.
Supposons cette condition remplie et que le gestionnaire central sache où se trouve chaque locomotive. Il peut alors connaitre les informations suivantes :
— le nombre de locomotives susceptible de rouler si on alimente la zone ;
— s'il n'y a qu'une dans une zone donnée (locomotive active);
— tout changement de la locomotive active.
En effet ces informations peuvent se déduire de la position de chaque aiguille et de l'état des zones d'isolement commandées manuellement. On voit alors que lors d'une manœuvre, le système est capable de suivre une locomotive avec la commande logique qui lui convient et une fois la manœuvre terminée de replacer la dite locomotive sous le contrôle de Caniche en mode bloc automatique sans que l'utilisateur n'ait à réaliser une opération d'association de la loco avec un canton.
Reste à voir comment situer l'emplacement de chaque locomotive.
Il n'est pas nécessaire de connaître la place d'une motrice de manière extrêmement précise. En fait, ce qui importe, c'est sa position par rapport aux aiguilles (ou TJD) et aussi par rapport aux zones d'isolement. Pour cela on peut placer un capteur sensible au passage d'une motrice au niveau de chaque appareil de voie. Une locomotive va déclencher l'envoi d'un message vers le gestionnaire central lors de son passage sur chaque aiguille. Ce signal permet au système central de savoir dans quelle voie va se trouver la loco puisqu'il connait son sens de circulation et la position de l'aiguille. De proche en proche, le système central conserve ainsi l'emplacement de la motrice active. Si le système est correctement initialisé, il connait aussi l'emplacement des motrices inactives et il les tient à jour si l'une ou l'autre devient active. Il est important que les wagons ou voitures soient ignorés des capteurs.
Situer l'emplacement des motrices
Voilà pour la théorie ! Reste à trouver un moyen de détecter le passage d'un motrice en un point, système qui, rappelons-le, doit rester insensible au passage des wagons ou voitures. J'ai examiné de nombreuses techniques, en éliminant celles trop complexes ou trop coûteuses. Les deux idées qui s'imposent sont les ILS (interrupteurs à lame souple) ou les capteurs infra-rouge.
Les ILS très utilisés en modélisme exige de placer un aimant sous chaque locomotive et ceci avec une bonne précision sur la hauteur afin d'être assez proche de l'ILS sans le heurter. La seconde idée utilise des capteurs infra-rouge agisant par réflexion. On ne peut pas envisager d'utiliser un faisceau infra-rouge par occultation car les wagons aussi serait détectés. Un capteur infra-rouge se dissimule entre les traverses et il ne réagira qu'au passage d'un petit élement réfléchissant collé sous la loco. Cela peut être un simple morceau de papier d'aluminium, un petit papier blanc, un morceau de miroir.
J'ai opté pour la solutions de l'infra-rouge qui présente plusieurs avantages sur les ILS. Il est plus facile de rendre fiable le fonctionnement du capteur infra-rouge car les ILS sont des composants mécaniques avec la fragilité qui les accompagne. On trouve des capteurs infra-rouges bien plus petits, moins fragiles et moins cher aussi que les ILS. Intégrés entre les traverses ils peuvent devenir presque invisible dans le ballast. Ils sont utilisables aussi plus facilement à l'échelle N que les ILS, ce qui intéresse mes deux copains Pierre et Jean-Luc.
Il faut bien sûr une carte électronique permettant de recevoir les signaux du capteur et qui informe le système centralisé par envoi d'un message sur le bus CAN. À noter qu'une carte de même nature serait aussi nécessaire pour les ILS.
Les ILS très utilisés en modélisme exige de placer un aimant sous chaque locomotive et ceci avec une bonne précision sur la hauteur afin d'être assez proche de l'ILS sans le heurter. La seconde idée utilise des capteurs infra-rouge agisant par réflexion. On ne peut pas envisager d'utiliser un faisceau infra-rouge par occultation car les wagons aussi serait détectés. Un capteur infra-rouge se dissimule entre les traverses et il ne réagira qu'au passage d'un petit élement réfléchissant collé sous la loco. Cela peut être un simple morceau de papier d'aluminium, un petit papier blanc, un morceau de miroir.
J'ai opté pour la solutions de l'infra-rouge qui présente plusieurs avantages sur les ILS. Il est plus facile de rendre fiable le fonctionnement du capteur infra-rouge car les ILS sont des composants mécaniques avec la fragilité qui les accompagne. On trouve des capteurs infra-rouges bien plus petits, moins fragiles et moins cher aussi que les ILS. Intégrés entre les traverses ils peuvent devenir presque invisible dans le ballast. Ils sont utilisables aussi plus facilement à l'échelle N que les ILS, ce qui intéresse mes deux copains Pierre et Jean-Luc.
Il faut bien sûr une carte électronique permettant de recevoir les signaux du capteur et qui informe le système centralisé par envoi d'un message sur le bus CAN. À noter qu'une carte de même nature serait aussi nécessaire pour les ILS.
Les essais en cours
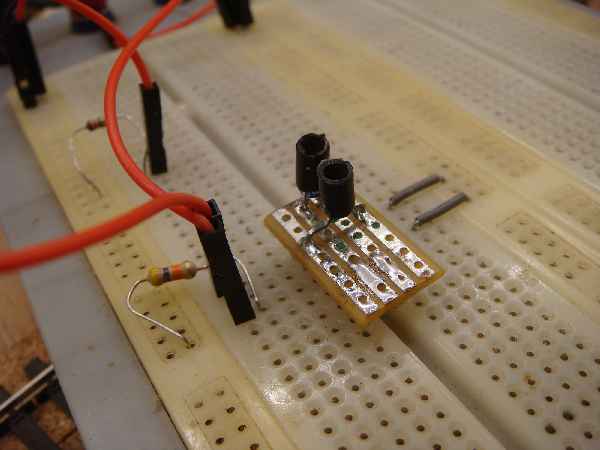
J'ai commencé réellement les investigations en réalisant un montage volant utilisant le capteur que l'on trouve ici. Il intègre dans le même composant une led infra-rouge et à ses côtés un photo-transistor. Un obstacle réfléchissant situé à proximité permet la détection à une distance entre 1 et 3 mm. Ses dimensions : 3,4 mm sur 2,7 mm pour une épaisseur de 1,5 mm (photo ci-contre).
En pleine voie, le système de cantonnement et le bloc automatique permettent de garder une commande de train associée à son train et ainsi avoir le choix de sa vitesse et de son sens de marche. Cela fonctionne parce que le système central connait en permanence l'emplacement des trains par les cantons qu'il occupent. Ce système ne fonctionne plus au niveau d'une loco en train de manœuvrer car comme elle peut se séparer de sa rame et que le système de détection ne permet pas de différencier une motrice d'un wagon, rapidement le système ne connait plus l'emplacement de la motrice. Il faudrait pouvoir suivre une locomotive au cours de ses déplacements afin de lui conserver la commande qui lui est associée.
Lorsque deux motrices sont sur les mêmes rails, il n'est pas possible comme en DCC de les piloter indépendamment. On limite à un le nombre de motrice simultanément en mouvement dans une zone de manœuvre. C'est ce que l'on faisait sur un réseau basique traditionnel avec un seul transformateur. Si d'autres locos sont présentes elles sont isolées par le biais de zones d'isolement déterminées manuellement par l'utilisateur avec des commutateurs ou bien par une aiguille mal mise. Une seule loco est active mais il est cependant possible de la changer pour une autre. Ceci se réalise en jouant sur les interrupteurs d'isolement et les aiguilles.On peut ainsi effectuer toutes les manœuvres que l'on souhaite si les emplacement des zones d'isolement ont été bien étudiés.
Avoir une seule locomotive active à la fois en manœuvre n'est pas vraiment restrictif, surtout si l'on est seul à piloter le réseau. Cela augmente du reste la sécurité de fonctionnement car dans ce mode, il n'y a plus rien qui empêche une collision.
Avoir une seule locomotive active à la fois en manœuvre n'est pas vraiment restrictif, surtout si l'on est seul à piloter le réseau. Cela augmente du reste la sécurité de fonctionnement car dans ce mode, il n'y a plus rien qui empêche une collision.
Approche générale du problème
Quatre situations de locomotive aux abords d'une aiguille. Le passage sur le capteur, la connaissance de la position de l'aiguille, le sens de marche, permettent au système central de déterminer la voie (entre deux aiguilles) dans laquelle la loco va se situer.
On procède de même avec les zones d'isolement. Une zone d'isolement accessible uniquement par la voie A demande un capteur (schéma e). Si la zone d'isolement est accessible par les deux extrémités, deux capteurs sont nécessaires (Schéma f).
Le réseau ainsi équipé, le gestionnaire central permet de suivre une locomotive en mode manœuvre. Il saura si la locomotive active change et de ce fait associera la commande adaptée à cette machine. Enfin le retour de la motrice active en mode bloc automatique ne nécessite pas d'autres actions de la part du conducteur que la demande du passage en mode bloc automatique pour cette motrice.
Ce système simule plutôt bien les manœuvres du monde des trains réels. Les locomotives sont en marche à vue à vitesse basse. C'est le conducteur qui gère l'approche d'une rame pour l'atteler. C'est aussi sa responsabilité de ne pas stationner sur une aiguille si on souhaite la changer. De manière automatique le système peut empêcher que plus d'une locomotive soit active. Cette interdiction peut éventuellement être levée si l'on souhaite réaliser de la double traction.
Ce système simule plutôt bien les manœuvres du monde des trains réels. Les locomotives sont en marche à vue à vitesse basse. C'est le conducteur qui gère l'approche d'une rame pour l'atteler. C'est aussi sa responsabilité de ne pas stationner sur une aiguille si on souhaite la changer. De manière automatique le système peut empêcher que plus d'une locomotive soit active. Cette interdiction peut éventuellement être levée si l'on souhaite réaliser de la double traction.
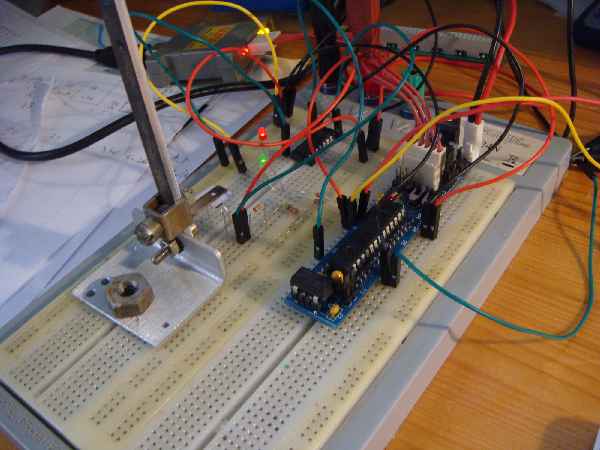
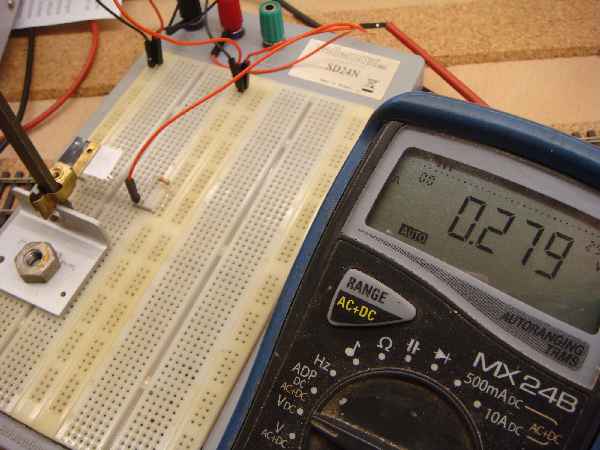
Le montage d'essai plus élaboré avec micro-contrôleur PIC. Le but est ici de mettre au point le programme. À droite le PIC 18F26K80 monté sur une carte de test apportant les ressources de base nécessaires au fonctionnement et à la programmation des PICs. À gauche les leds de contrôle et le capteur. La potence en L permet de placer un réflecteur au dessus du capteur à une hauteur précise réglable pour réaliser les tests.
À l'heure actuelle, les premiers essais sont concluants. Le programme du PIC gérant les capteurs fonctionne corectement avec une détection franche et pas de détections parasites. La prochaine étape est la réalisation de la carte électronique qui pilotera jusqu'à 48 capteurs simultanéments. Je n'aurai besoin pour mon réseau que de 2 ou 3 cartes de ce type.
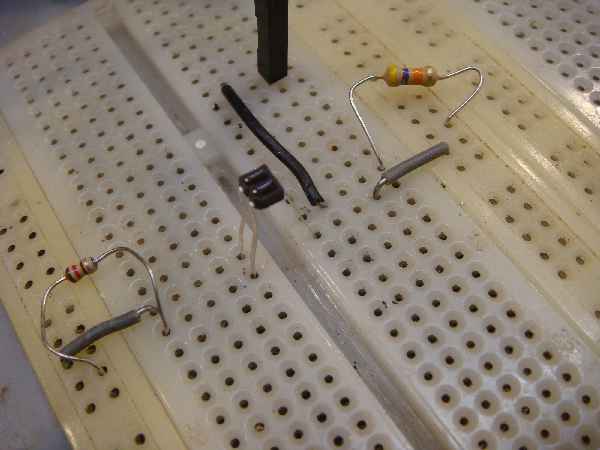
Le capteur est le premier composant placé lors de la construction du montage d'essai.
Dans un premier temps, j'ai effectué dfférents tests avec des capteurs maisons en associant une led infra-rouge et un photo-transistor en composants discrets. L'une des difficultés est d'isoler les deux l'un de l'autre d'un point de vue lumineux pour que le transistor ne reçoive par le rayonnement de la diode voisine autrement que par réflexion. Premiers essais en isolant avec de la pâte à modeler. Échec complet, c'est comme si la pâte était transparente ! Isolation par deux petits tubes de plastique. Cela fonctionne et la détection a lieu à plisieurs centimètres. Problème : difficile de camoufler cela entre les traverses !
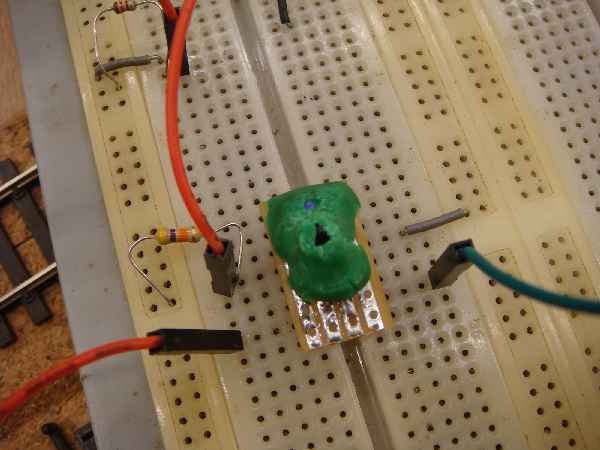
Mesures basiques pour vérifier que l'on peut bien atteindre le zéro de la logique TTL avec un réflecteur facile à fabriquer (papier blanc, papier d'aluminium…)
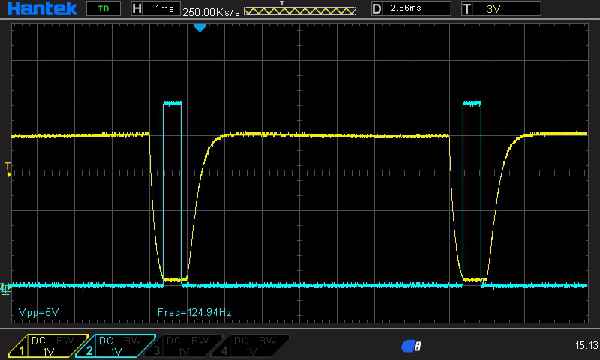
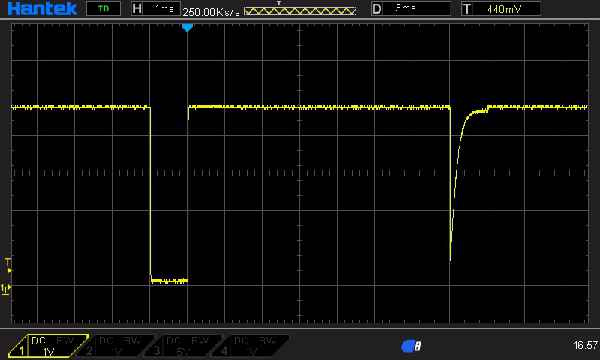
L'oscilloscope est indipensable pour la mise au point du programme et la validation du montage. En jaune le signal pris sur le collecteur du photo-transistor et en vert le signal correspondant à la lecture . Cette lecture doit intervenir lorsque le transistor a atteint sa tension de repos ce qui prend quelques millisecondes après éclairement. Le traitement d'un capteur n'utilise que 1 ms sur les 8 ms ce qui permet de traier par multiplexage 8 groupes de capteurs, chaque groupe en comportant 6 fonctionnant ensemble.
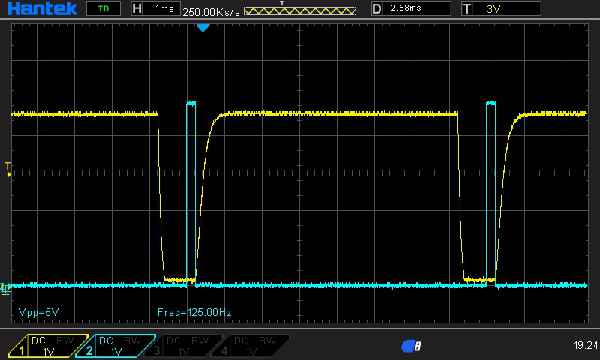
Le signal présente deux formes différentes chaque période de 8 ms. À gauche (forme rectangulaire), le transistor est éclairé par la led IR par réflexion. Le programme détecte un passage à zéro et donc la présence d'une loco. À droite, le pic correspond à la led infra-rouge éteinte afin de vérifier qu'il n'y a pas un rayonnement parasite dans la pièce. Il ne donne pas lieu ici à une lecture de zéro car pour cet essai il n'y a pas de lumière infra-rouge parasite. Dans le cas contraire la mesure serait ignorée et un message d'erreur transmis au gestionnaire central.
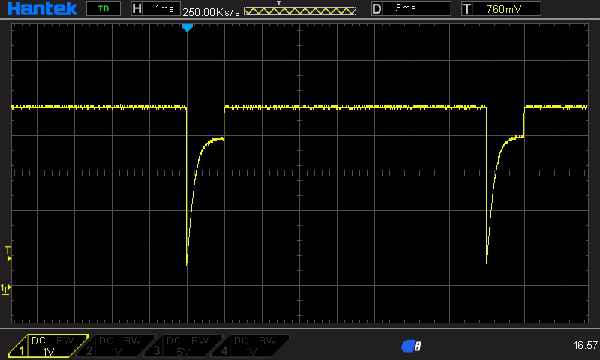
Le signal en l'absence de réflexion (absence de locomotive) il n'y a que les pics de mise sous tension des photos-transistors, pics qui ne sont pas détectés comme des valeurs nulles.